Verbesserte Kommunikation zwischen Drohnen und Boden – Masterstudent stellt aktuelle Forschungserkenntnisse auf internationaler Konferenz vor
Die Einsatzmöglichkeiten von Drohnen sind enorm breit gefächert, eingeschränkt sind sie aber oft dadurch, dass Drohnen noch nicht zuverlässig (teil-) autonom außerhalb der Sichtweite operieren können und dies auch nicht dürfen. Hier setzt das von der EU und den nationalen Behörden geförderte Forschungsprojekt „Airborne data collection on resilient system architectures“ (ADACORSA) an. Projektmitarbeiter und Masterstudent Patrick Purucker stellte dazu aktuelle Forschungserkenntnisse auf der Konferenz „The 2021 International Conference on Unmanned Aircraft Systems“ vor.
Das Automotive-Team der OTH Amberg-Weiden beschäftigt sich im Rahmen von ADACORSA mit der Forschung an der mobilfunkbasierten Kommunikation mit Drohnen. Dabei soll unter Verwendung von KI-Algorithmen eine Verbesserung der Kommunikation zwischen Drohne und Boden ermöglicht werden, damit Drohnen künftig automatisiert und in großen Entfernungen vom Bediener, also außerhalb der Sichtreichweite, eingesetzt werden können.
Im Zuge dessen wurden zunächst Anforderungen definiert, damit eine solche mobilfunkbasierte Kommunikation zwischen einer Drohne und einem Server implementiert werden kann. Die Erkenntnisse wurden in Form eines wissenschaftlichen Papers von Patrick Purucker und seinem Kollegen Josef Schmid (Doktorand) zusammengefasst und bei der Konferenz „The 2021 International Conference on Unmanned Aircraft Systems“ kurz ICUAS2021 eingereicht. Das Paper durchlief den bei dieser renommierten Konferenz vorgeschalteten Peer-Review Prozess, bei dem die wissenschaftliche Arbeit von unabhängigen Gutachtern auf Wissenschaftlichkeit, Richtigkeit und Relevanz überprüft wird.
Im Rahmen der Konferenz wurden mehr als 200 Paper vorgestellt und zudem Workshops abgehalten. Die Vorträge fanden in vier parallelen Räumen statt. Dabei wurden thematisch verwandte Vorträge zu insgesamt 36 Sessions zusammengefasst. Der thematisch größte Teil beschäftigte sich mit Algorithmen zur Wegplanung. Einige Beiträge befassten sich beispielsweise mit der Ermittlung der optimalen Drohnenflugroute unter Berücksichtigung möglicher Hindernisse (z. B. Hochspannungsleitungen). Ein weiterer großer Themenbereich deckte Applikationen von Drohnen ab. Beispielsweise wurde in diesem Zusammenhang die Zusammenarbeit mehrerer Drohnen zur Erkennung und Bekämpfung von Bränden vorgestellt.
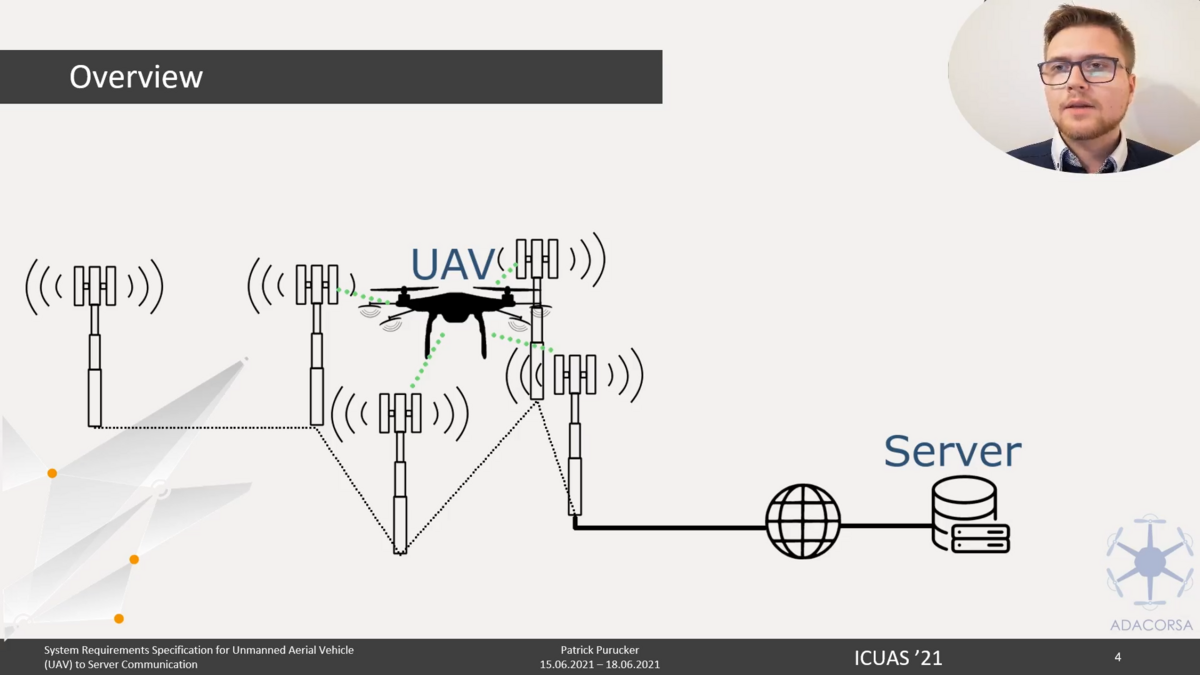
In der Session „UAS Communications“ stellte Patrick Purucker schließlich sein Paper mit dem Titel „System Requirements Specification for Unmanned Aerial Vehicle (UAV) to Server Communication“ vor (siehe Abbildung). Dabei ging er zunächst auf generelle Anforderungen an die Kommunikation zwischen Drohne und Server sowie auf Probleme bei Verwendung von LTE (4G) ein. Neben möglichen Lösungsansätzen präsentierte er die Vorteile der 5G-Technologie für sicherheitsrelevante Anwendungen. Die Verwendung verschiedener Netzwerkprotokolle im Drohnenumfeld wurde diskutiert und die LoRa Kommunikation als ergänzende Technologie zum Mobilfunk vorgestellt. Schließlich gab er einen Ausblick auf die weiteren Forschungsarbeiten. Zusammen mit seinem brasilianischen Kollegen Santos Brandão (Chair) leitete und moderierte Patrick Purucker (Co-Chair) die Session.