Real Time based Simulation with the Finite Elemente Methode
Im Rahmen eines Vortrags am Fraunhofer-Institut für Techno- und Wirtschaftsmathematik ITWM von Prof. Dr. Franz Magerl (Dekan der Fakultät Wirtschaftsingenieurwesen) wurde eine Echtzeitsimulation zur Analyse, Bewertung und Optimierung von Kabel- und Schlauchbewegungen in der Medizintechnik, basierend auf einem nichtlinearen Cosserat-Balkenmodell, vorgestellt. Die Differenzierung zur klassischen Finite-Elemente-Methode mit Balken- und Volumenkörpern und zur Mehrkörpersimulation mit flexiblen eindimensionalen Körpern wurde im Rahmen des Vortrags diskutiert und bewertet.
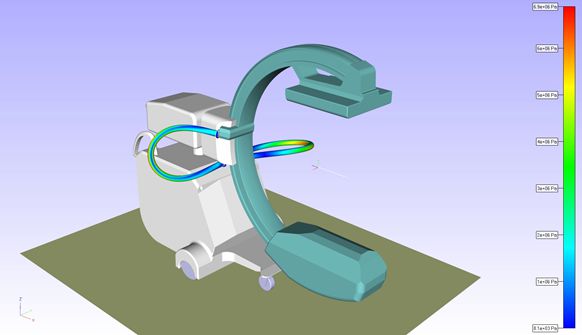
In der Medizintechnik werden diagnostische Röntgensysteme mit Röntgenquellen, Detektoren und anderem Equipment ausgestattet. Diese Komponenten müssen flexibel zum ruhenden Patienten positioniert werden. Die Halterung der Komponenten sind in der Regel mehrachsige mechatronisches Gebilde, wie z. B. 6-Achs-Industrieroboter oder mehrachsige C-Bogenstative. Die Komponenten sind mit einem stationären Zentralsystem über Datenleitungen, Energieleitungen und Kühlleitungen verbunden. Diese Leitungen sind zu einem Bündel zusammengefasst und werden in einem Schutzschlauch am Stativ geführt. Die Entwicklung der Schlauchführung mit entsprechenden Stützstellen und Speichermöglichkeiten wurde bis heute dominierend experimentiell durchgeführt. Um die Entwicklungszeiten zu verkürzen, alternative Lösungen zu konzipieren und die Entwicklungsqualität zu verbessern ist es notwendig, spezifische Simulationsverfahren zu entwickeln und einzusetzen, mit denen die flexiblen Systeme in Echtzeit modelliert und am Computer optimiert werden können. Als Eingangsparameter für die Simulation sind die Biege-, Zug- und Torsionssteifigkeiten und die Materialdichte notwendig. Zur Bestimmung der Steifigkeiten und zur exemplarischen Verifikation wurde ein spezifischer Prüfstand entwickelt, da für die Simulation die Materialcharakterisierung eine dominierende Rolle spielt. Die wichtigsten Funktionalitäten der verfügbaren Simulationsergebnisse, die im Rahmen des Vortrages diskutiert wurden, sind nachfolgend dargestellt: - Berechnung der Reaktionskräfte und –momente - Optimierung der Kabel- bzw. Schlauchlänge - Hinweise bei der Überschreitung von Grenzwerten - Hinzufügung und Entfernung von Clips und Verzweigungen - Synchronisierung der Bewegungsabläufen - Interaktive Manipulation in Echtzeit - Kollisionsdetektion - Fremd- und Eigenkontaktberechnung - Berechnung des Hüllvolumens beim Bewegungsvorgang