
Ausstattung
Hardwareausstattung
Rechnerarbeitsplätze für Rechnerübungen und Projekt-/Abschlussarbeiten

Zur Vertiefung des Vorlesungsstoffes und zur Durchführung von PC-basierten Laborübungen stehen neun Rechnerarbeitsplätze zur Verfügung. Auf der Basis von virtuellen Maschinenmodellen können praxisnahe Übungen zu den Themenfeldern Roboter-Offline-Programmierung, Virtuelle Inbetriebnahme, SPS- und Motion Control-Programmierung durchgeführt werden. Der Rechnerbereich wird darüber hinaus für die Durchführung von Projektarbeiten und Abschlussarbeiten verwendet.
Industrieroboterzelle 1

Die Industrieroboterzelle 1 beinhaltet zwei KUKA-Industrieroboter (KR15/2, KR45/2), ausgestattet mit Kraft/Momentensensoren und Smartkamera, ein Lichtgittersystem der Firma Sick und einen Fördertechnikrundlauf der Firma Syskomp. Die Zelle ist gekoppelt mit dem Montech-Monorail-System. Bei öffentlichen Vorführungen wird die Zelle zum automatischen Einschenken von Weizenbier verwendet
Unter folgenden Link kann die Industrieroboterzelle beim Weißbier Einschenken in Aktion gesehen werden:
https://www.youtube.com/watch?v=SP4LG64lUeA
Montech-Monorail-System

Bei dem Montech-Monorail-System handelt es sich um ein spurgeführtes Shuttlesystem. Über pneumatisch betriebene Weichen können die Verfahrwege variiert werden. Die Zelle enthält zusätzlich einen Low-Cost-Roboter der Firma Igus.
Industrieroboterzelle 2 (KIR-Zelle)
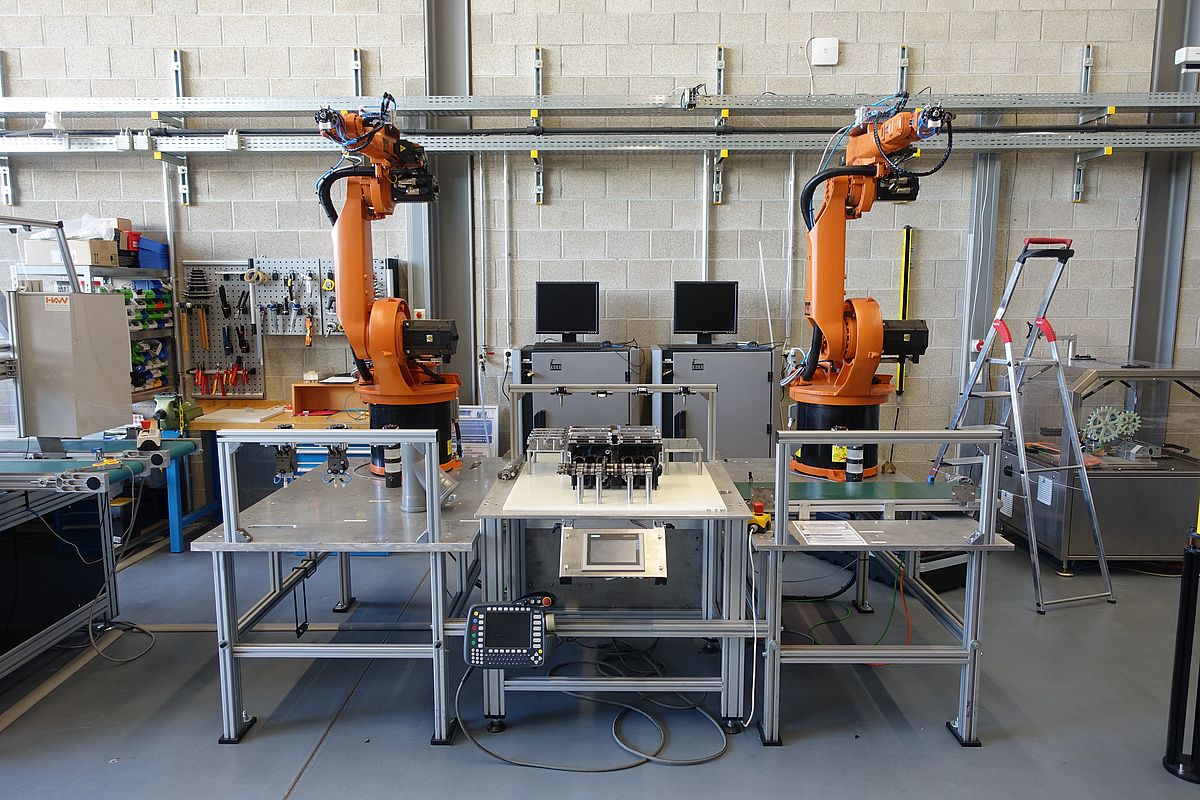
Die Industrieroboterzelle 2 beinhaltet zwei KUKA-Industrieroboter (KR6/2), ein Werkzeugwechselsystem der Firma Schunk, einen Bandförderer und mehrere Greif- und Schraubwerkzeuge. Die Besonderheit der Zelle liegt in dem Softwarepaket für kooperierenden Roboterbetrieb (KIR). Damit ist es möglich die Bewegungen der beiden Roboter exakt zu synchronisieren (Master/Slave-Betrieb). Die Roboter können damit gemeinsam Werkstücke handhaben.
Leichtbaurobotik
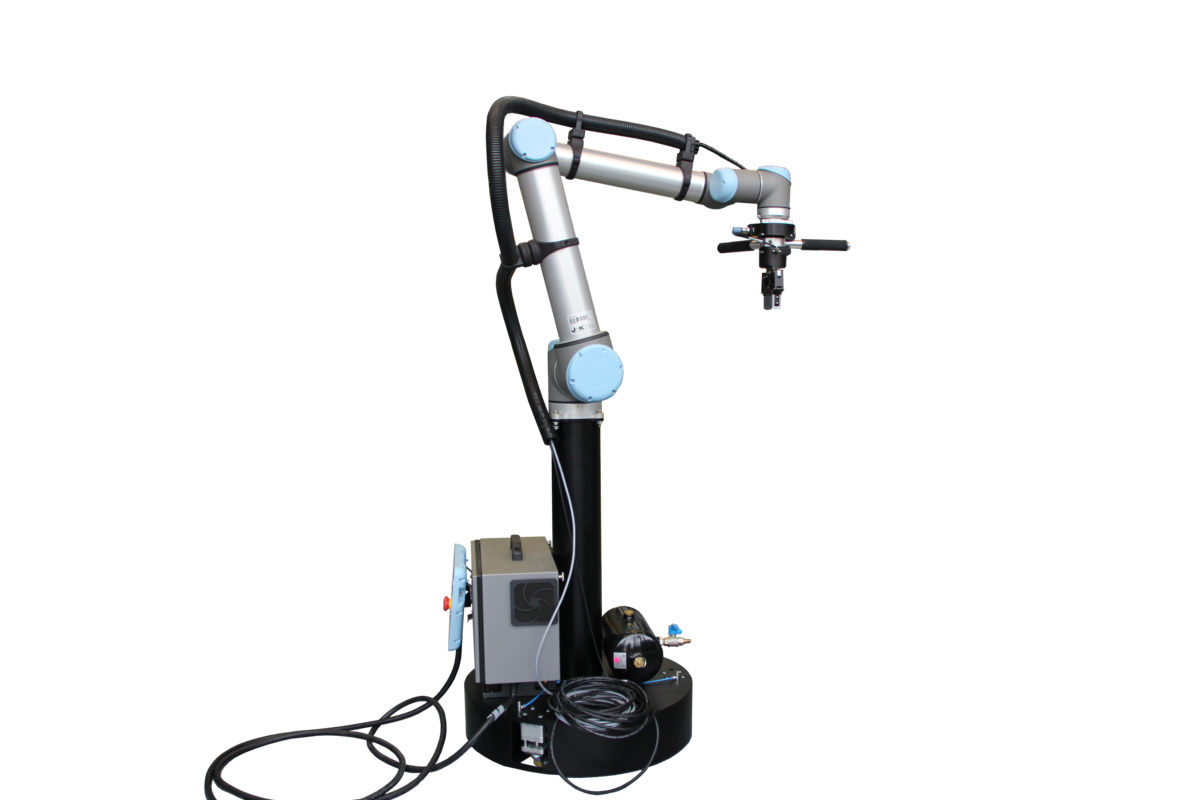
Im Bereich Leichtbaurobotik verfügt das Labor über zwei Leichtbauroboter der Firma Universal Robots (UR10, UR5e).
Beide Roboter sind mit Kraft/Momentensensorik und Bildverarbeitungssystemen ausgestattet. Der UR10 steht auf einem selbstentwickelten Sockel, der den Roboter ortsflexibel einsatzbar macht. Der UR5e-Roboter ist über einen adaptierbaren Wagen in eine Roboterzelle integriert. Diese beinhaltet ein 3D-Bildverarbeitungssytem der Firma Roboception für sog. Bin Picking Applikationen.
Deltapicker

Ein Deltapicker stellt eine hochdynamische 4-Achs-Roboterkinematik dar. Durch die Verwendung von Komponenten aus glasfaserverstärktem Kunststoff zeichnen sich die Achsen durch sehr geringe Trägheitsmomente aus. Die Zelle ist mit einer Siemens Simotion-P320-Motion Control Steuerung ausgestattet. Sie dient als Demonstrations- und Übungszelle für Motion Control Applikationen. Zum Werkstücktransport enthält die Zelle zwei Bandförderer.
Zahnrad-Demonstrationszelle
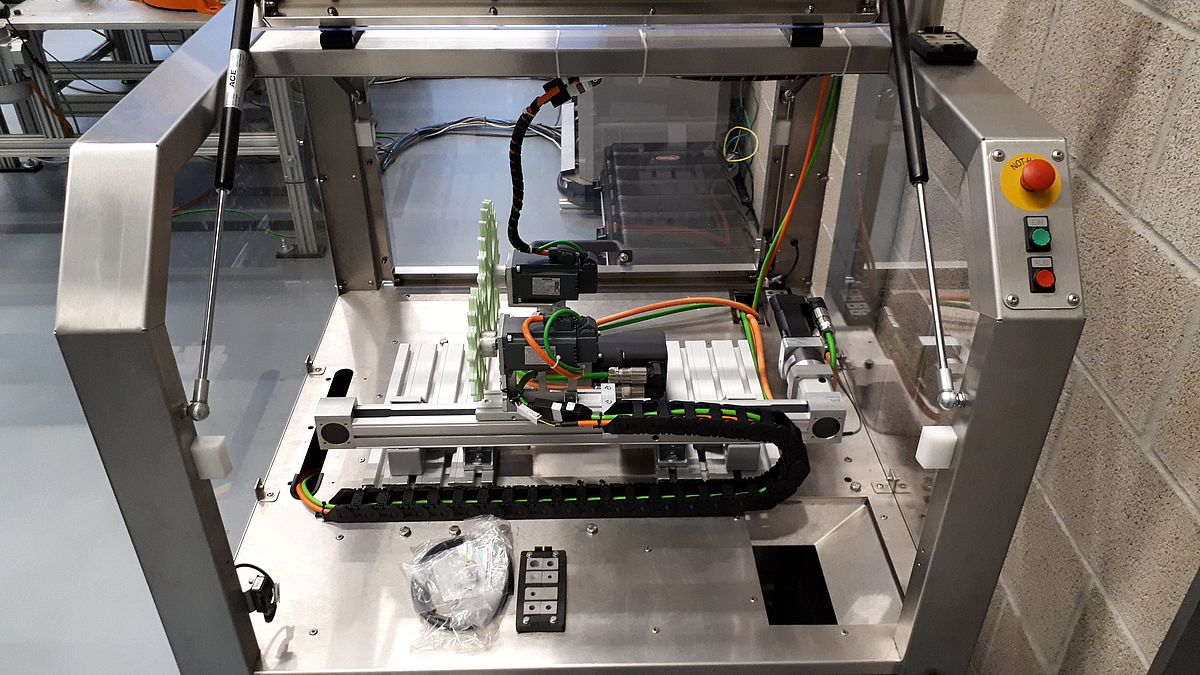
Die Zahnrad-Demonstrationszelle dient als Übungszelle für die Motion Control Programmierung. Sie enthält mehrere Servoantriebe, die von einer Siemens Technologie-CPU gesteuert werden. Momentan ist eine Demonstrationsapplikation aufgebaut, die den synchronen Gleichlauf mehrerer Zahnräder verdeutlicht.
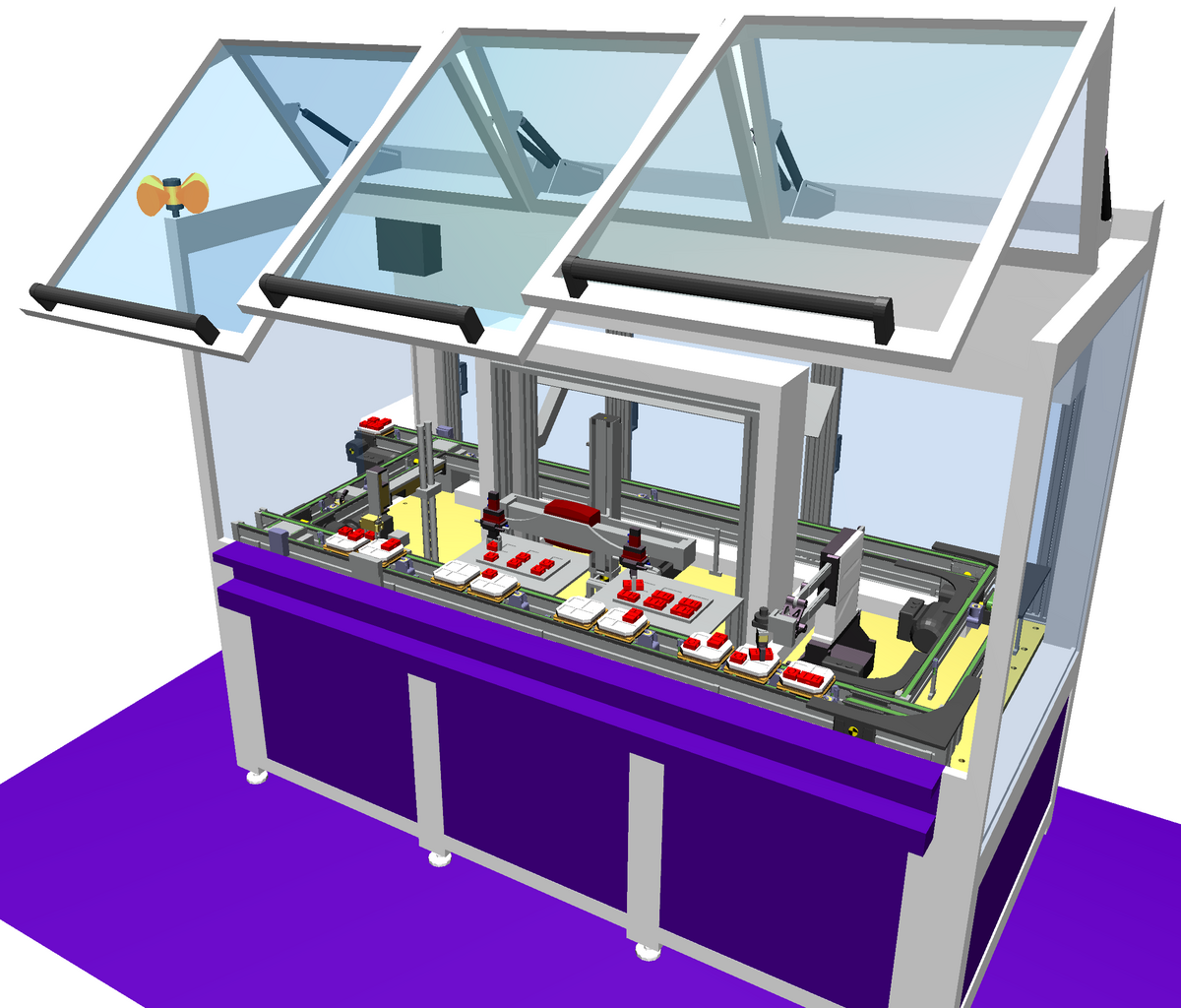
Montagezelle SimEM
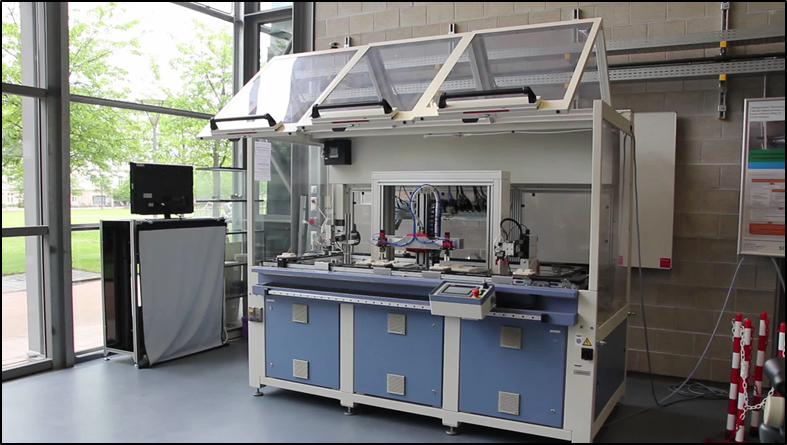
Die Montagezelle SimEM wird als Demonstrator für Forschungsprojekte in den Bereich Energiemanagement und selbstadaptierende Systeme eingesetzt. Sie enthält drei Handhabungssysteme und einen Gurtföderer-basierten Rundlauf mit Werkstückträgern. Die Zelle ist mit einer Vielzahl an Energiemesssystemen ausgestattet. Über das Feldbussystem PROFIenergy ist es möglich einzelne Zellenkomponenten in einen energiesparenden Zustand zu versetzen.
Softwareausstattung
Virtuelle Inbetriebnahme mit ISG Virtuos
Für alle Forschungsaktivitäten im Bereich Virtuelle Inbetriebnahme wird die Software Virtuos der Firma ISG eingesetzt. Dies ist die einzige Software, mit der wirkliche Echtzeit-Simulation möglich ist. Alle Laborzellen sind bereits in Virtuos abgebildet. Bei vielen Forschungsprojekten wurde Virtuos als zuverlässige und leistungsfähige Simulationssoftware eingesetzt.
EPLAN Engineering Configuration (EEC)
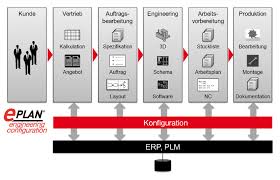
Das EPLAN Engineering Configuration Tool EEC ermöglicht die funktionale Beschreibung von Anlagenfunktionalitäten. Dies stellt die Grundlage für die automatische Generierung von Simulationsmodellen für die Virtuelle Inbetriebnahme dar. In mehreren Forschungsprojekten konnte gezeigt werden, dass damit der Aufwand für die Modellerstellung deutlich reduziert werden kann.
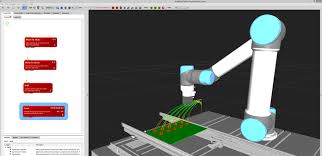
Roboter-Offline-Programmiersystem RoboDK

RoboDK ist ein offenes Offline-Programmiersystem für Roboter verschiedenster Hersteller. Es bietet umfangreiche Programmierfeatures für alle denkbaren Roboteraufgaben. Durch seine Offenheit ist es möglich das System durch eigenen Code zu erweitern. RoboDK wird im Labor für Rechnerübungen zur Offline-Programmierung und zur Programmierung der eigenen Roboterzellen eingesetzt. Besonderes Highlight der Software ist eine Funktionalität zur Roboterkalibrierung. Damit kann ein virtuelles Robotermodell exakt mit dem realen Robotersystem abgeglichen werden. Die ist die Grundlage für realitätsnahe Simulationsstudien.
Roboterprogrammierung mit ArtiMinds RPS
ArtiMinds RPS ist eine Online-/Offline-Programmierumgebung für die Robotik. Wir verwenden ArtiMinds RPS für die Entwicklung von Kraft-/Momenten-geregelten oder Bildverarbeitungsbasierten Applikationen für unsere Leichtbauroboter. Durch die intuitive Programmierung können selbst Studierende ohne Vorkenntnisse schnell komplexe Roboterapplikationen realisieren.
3D-Softwareplattform VXelements

Das Labor verfügt über ein tragbares optisches Koordinatenmesssystem (C-Track) der Firma Creaform. Damit ist es möglich Roboter zu kalibrieren oder Zellen bis auf eine Genauigkeit von 20 Mikrometern zu vermessen. Die Messtechniksoftware heißt VXelements. Das Koordinatenmesssystem kann mit RoboDK kommunizieren und ermöglicht dadurch die Roboterkalibrierung.
Engineering-Plattform Siemens TIA Portal

Für die SPS- und Motion Control-Programmierung wird im Labor die Engineering-Plattform TIA Portal verwendet. Studierende lernen in Projekt- und Abschlussarbeiten das TIA Portal kennen und realisieren damit umfangreiche Automatisierungsprojekte.
3D-Entwicklungssystem Unity3D

Als Entwicklungssystem für AR-Anwendungen wird im Labor unity3D eingesetzt. Damit ist es möglich AR-Anwendungen für beliebige Plattformen zu erstellen. Zur Integration von CAD-Modellen in unity3D wird die Software PiXYZ verwendet.