Projekte und Forschung
Das Team Automotive ist in mehrere EU geförderte Projekte mit den Themen autonomes Fahren und Künstliche Intelligenz involviert.
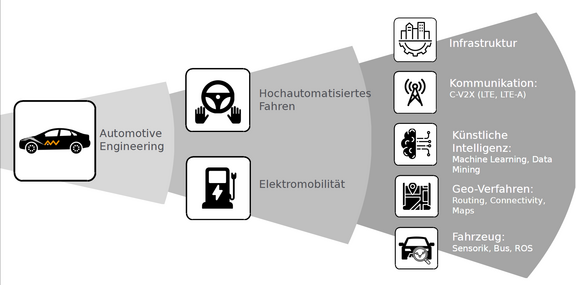
Forschungsthemen
- KI Algorithmen
- Elektromobilität: Energieoptimiertes Routing für Elektrofahrzeuge
- Autonomes Fahren
- Sensordatenverarbeitung
Projekte
Laufende Projekte

Artificial Intelligence using Quantum measured Information for distributed real-time systems at the edge of the network
A-IQ Ready proposes cutting-edge quantum sensing, edge continuum orchestration of AI and distributed collaborative intelligence technologies to implement the vision of intelligent and autonomous ECS for the digital age. Quantum magnetic flux and gyro sensors enable highest sensitivity and accuracy without any need for calibration, offer unmatched properties when used in combination with a magnetic field map. Such a localization system will enhance the timing and accuracy of the autonomous agents and will reduce false alarms or misinformation by means of AI and multi-agent system concepts.
By exploring the synergies of these cutting-edge technologies through civil safety and security, digital health, smart logistics for supply chains and propulsion use cases, A-IQ Ready will provide the basis for the digital society in Europe based on values, moving towards the ideal of Society 5.0.
Vision:
- Entwicklung einer Edge Continuum Orchestration for AI
- Bereitstellung einer Energie- und Ressourceneffizienten System Infrastuktur für verteilte Systeme
Ziele:
- Bereitstellung von AI-Methoden für die Autonomie von Multiagentensystemen in unsicheren Umgebungen
- Erhöhung der Erkennungsgenauigkeit, Zuverlässigkeit und Vertrauenswürdigkeit in komplexen Umgebungen mit neuen Sensoren
- Bereitstellung einer Open AI Edge-Kontinuum-Plattform
- Entwicklung von Anwendungen für die digitale Gesellschaft
Auswirkungen:
- Anwendung dreier bahnbrechenden Technologien: Quantensensoren, neuromorphe Beschleunigung, KI in Multi-Agenten-Systemen zum Aufbau eines Edge Kontinuums als digitales Rückgrat der Gesellschaft
| Projektpartner: | AVL LIST GmbH + 47 weitere Partner in der EU |
|---|---|
| Fördergeber: | EU |
| Laufzeit: | 01.01.2023– 31.12.2025 |
Entwicklung eines zuverlässigen und sicheren Kommunikationssystems für unterirdisch einsetzbare UGVs/UAVs, basierend auf einem digitalen Zwilling eines Search & Rescue Testgeländes. Implementierung von Mechanismen zur Identifizierung von Ausfällen und Bewertung des State-of-Health und der QoS.
| Projektpartner: | 49 Projektpartner EU-weit |
|---|---|
| Fördergeber: | EU und Bundesministerium für Bildung und Forschung (BMBF) |
| Laufzeit: | 01.05.2023 – 30.04.2026 |
Das übergreifende Ziel von PowerizeD ist die Entwicklung bahnbrechender Technologien für digitalisierte und intelligente Leistungselektronik, die eine nachhaltige und resiliente Energieerzeugung, -übertragung und -anwendung ermöglicht. PowerizeD erhöht den Grad der mechanischen und elektrischen Integration der Steuer-, Treiber- und Schaltfunktionalität in einer Komponente und ermöglicht zum ersten Mal eine gemeinsame Optimierung aller Leistungsschalterfunktionalitäten.
Die Verwendung von neuen Schaltungsmodellen, fortschrittlichen Steuerungsstrategien und künstlicher Intelligenz ermöglicht die Integration von Teilen des Regelkreises, was einen robusten und zuverlässigen Betrieb ermöglicht. Um die gemeinsame Nutzung von Daten entlang der Wertschöpfungskette zu erleichtern, setzt PowerizeD auf den neuartigen Ansatz des Federated Learning. Diese kollaborative Optimierung von spezifischen kompakten Modellen und neuronalen Netzen
Shape Future - Ensuring European ECS Value Chain Sovereignty through Shaping the Future of ECS for Automotive Applications

Die globale Industrie hat radikale Entwicklungen durchlaufen, von menschlichen Fertigungsprozessen bis hin zur industriellen Digitalisierung und der Einführung von Robotern, die bis ins kleinste Detail durchdacht sind und ein tiefes Verständnis für komplexe Produkte.
Die industriellen Entwicklungen wurden bisher stark von elektronischen Komponenten und Systemen (ECS) beeinflusst. Im Laufe dieser industriellen (R)Evolutionen haben sich die ECS von einfachen Vakuumröhren zu hochintegrierten Schaltkreisen entwickelt, Mikroprozessoren, Sensoren, Aktoren und fortgeschrittenen Kommunikationstechnologien entwickelt.
Insbesondere im Bereich der Mobilität haben ECS bisher zu großen Fortschritten beigetragen. Seit über einem Jahrzehnt, sind wahrnehmungsbasierte Lösungen für den Massenmarkt verfügbar, die z. B. Kollisionen verhindern und die Fahrzeugautomatisierung vorantreiben. für den Massenmarkt verfügbar. Darüber hinaus durchläuft die Mobilität einen tiefgreifenden Wandel, der durch ein Zusammenspiel von Faktoren, die von Umweltbelangen bis zu technologischen Fortschritten reichen. Dieser Wandel ist entscheidend für die Bewältigung Herausforderungen wie dem Klimawandel, der Verkehrsüberlastung in den Städten und dem Bedarf an effizienteren und nachhaltigeren Mobilitätslösungen auf dem Weg zu einer Mobilität ohne Todesopfer.
Mit dem Vorhaben VRUIDFUL soll ein klarer Schwerpunkt auf die Erweiterung der bisherigen Forschungsarbeiten der OTH Amberg-Weiden im Bereich Mobilität auf intelligente Infrastruktur (z.B. Sensorik, erweiterte Ampelanlagen) gelegt werden. Konkret soll deren Aufbau in einem realen urbanen Testfeld und deren Einbindung in ein integrales Sicherheitssystem für ungeschützte Verkehrsteilnehmer (VRU) in mehreren Phasen erforscht werden:Im Rahmen dieses Antrags soll ein besonders stark von ungeschützten Verkehrsteilnehmern (VRU) frequentiertes Areal (um Hochschule, KiTa und Kindergarten) in Amberg mit intelligenten Infrastruktureinheiten (IISE) ausgestattet werden. Mit diesen sollen umfangreiche Daten gesammelt und ausgewertet werden.
Die Sensorik in den IISE basiert auf Radar, Lidar, Wärmebild- und Stereokamera, die Intelligenz in den Einheiten zielt auf die Erkennung und Klassifikation von Objekten, insbesondere VRU und Gruppen von VRU.Die gewonnenen abstrahierten Daten (3D Cubes) werden mittels Mobilfunks, ITS-G5 (und z.T. LoRA) an einen zentralen Server übertragen, gespeichert und können für die weitere Auswertung verwendet werden. Da ausschließlich abstrahierte Daten an den Server übertragen und gespeichert werden, ist die Einhaltung des Datenschutzes gewährleistet.Parallel dazu sollen ausgewählte Ampelanlagen im Testfeld mit V2x-Kommunikationseinheiten und Anbindung an den Verkehrsleitrechner ertüchtigt werden, die Ampelphasen vorausschauend auszusenden. Diese Informationen werden zeitsynchronisiert mit auf dem Server abgelegt. Ebenso werden weitere Daten wie Witterung mit aufgezeichnet, um die Einflüsse von Ampelschaltungen und Witterung auf das Verhalten von VRU fundiert auszuwerten zu können.
Auf Basis der dadurch gewonnenen Forschungsdaten sollen in einer zweiten Phase Forschungsprojekte zur Intentionserkennung von ungeschützten Verkehrsteilnehmern und deren Verhalten zusammen mit Partnern (z.B. aus dem bayerischen KI-Mobilitätsnetzwerk „AImotion“) initiiert werden. Aus den daraus resultierenden Erkenntnissen sollen Warnstrategien und Handlungsempfehlungen für Fahrzeuge abgeleitet werden, um potenziell gefährliche Szenarien (etwa Fußgänger oder Radfahrer, die nach längerer „grün“-Phase bei „rot“ werdender Fußgängerampel „noch schnell“ die Straße überqueren möchten, oder unaufmerksam hinter einem Pulk anderer VRUs hinterherlaufende Fußgänger) frühzeitig zu erkennen und Unfälle zu vermeiden.
Aufwand und Nutzen sollen bewertet werden.In einer dritten Phase sollen diese Warnstrategien und Handlungsempfehlungen mit den beteiligten Stakeholdern, d.h. Verkehrsplaner, Fahrzeughersteller, Bürgern etc. diskutiert werden. Zunächst könnte z.B. eine Smartphone-App helfen, die Aufmerksamkeit von Fußgängern zu erhöhen. Gesamtziel wäre aber, das integrale System in gemeinsamen Projekten mit Fahrzeugherstellern und Verkehrsplanern Realität werden zu lassen, also nicht nur die Fußgänger, sondern auch die Fahrzeuge in das Warnkonzept einzubinden.
| Fördergeber: | Deutsche Forschungsgemeinschaft |
|---|---|
| Laufzeit: | 01.04.2022 – 31.03.2028 |
Abgeschlossene Projekte
Der Bedarf an gemeinsamen, skalierbaren und markenunabhängigen Technologieplattformen für die Schlüsselelemente von Elektrofahrzeugen (EVs), wie Wechselrichter-Motor-Getriebe (Antriebsstrang) und Batterie, ist offensichtlich. Das Projekt 1000kmPLUS wird die Überlegenheit der europäischen Automobil-Schlüsseltechnologien in Bezug auf Leistung, Skalierbarkeit und Kosten sicherstellen
Um einen Durchbruch in Bezug auf Energieeffizienz, Reichweite, Aufladung und Kosten zu erzielen, entwickelt das 1000kmPLUS-Projekt eine Scalable European Powertrain Technology Platform (SEPtop@SiC). Darüber hinaus wird ultraschnelles Laden mit bis zu 350 kW für den alltäglichen Gebrauch in einem Elektrofahrzeug demonstriert, welches, basierend auf seiner Batteriekapazität eine anfängliche Reichweite von 500 km aufweist.
Die Ziele des Projekts sind:
- Erhöhung der Attraktivität von Elektroautos durch größere Reichweite
- Validierung auf Teststrecken der Länge 1000, 2000 und 4500km
- Erstellung und Optimierung einer Routing-Applikation unter Berücksichtigung mehrerer Faktoren
(z.B. Batteriestatus, verfügbare Ladestationen) - Erhöhung der Reichweite durch die Verwendung der Powertrain-Technologie
- Verringerung der Reisedauer durch verkürzte Ladezeiten
Die OTH-AW wird die Routing-Algorithmen für das optimierte Routing-System entwickeln. Das Routing wird an die Batterieladewerte und verschiedene definierte Einflüsse auf die Strecke angepasst. Das Routing-System wird die am besten geeignete Ladestation auswählen, um Ziele innerhalb Europas zu erreichen. Dabei wird die Ladecharakteristik der Batterie berücksichtigt und das System wird Empfehlungen für eine energieeffiziente Strecke für das Fahrzeugsystem geben.
| Projektpartner: |
|
|---|---|
| Fördergeber: | EU |
| Laufzeit: | 01.10.2019 – 30.06.2023 |
„Integrated Components for Complexitiy Control in affordable electrified cars“ – Förderung der Elektromobilität durch die Erhöhung der Zuverlässigkeit und Ausfallsicherheit hochautomatisierter E-Fahrzeuge.
Serverbasierte über Mobilfunk realisierte Dienste zur Reichweitenoptimierung von E-Fahrzeuge.
Am 01.06.2015 startete das EU-Projekt 3Ccar. Die OTH-AW arbeite bei dem von der Europäischen Kommission geförderten Projekt zusammen mit fast 50 Projektpartner und der Leitung von Infineon. Ziel des Projekts ist es, Elektromobilität auf ein neues technisches Niveau zu heben und die Relevanz der Fahrzeuge im Markt zu erhöhen. Zu den Projektpartnern gehören u.a. Siemens, BMW, Daimler, AVL, TNO und NXP und die Universitäten Dresden, Graz, Brno und die Fraunhofer Gesellschaft. Die Projektlaufzeit beträgt 3 Jahre.
Das Gesamtziel des 3CCar - Projekt ist verbesserte Kontrolle der erhöhten Komplexität durch Anwendung neuer Ansätze auf nanotechnologischen Komponenten. Dadurch sollen Fehlerraten und Fahrzeugkosten reduziert werden.
3Ccar verfolgt zwei parallele gesellschaftliche Ziele: Bedienen der soziale Bedürfnisse und die Erhaltung der globalen Führung. Das Projekt bringt wichtige Auswirkungen für Europas innovationsgetriebene Branchen durch hochqualifizierte Arbeitsplätze. Die Entwicklung und der Einsatz neuer Fähigkeiten, die von der Elektronik, von den Komponenten und den Systemen eingebracht werden, sind der Schlüsselfaktor um diese Ziele zu erreichen, da es Fahrzeuge und Transportsysteme mit der notwendigen Intelligenz ausstatten und gleichzeitig die etablierten Stärken der europäischen Industrie aufbauen und weiter steigern wird.
Die Ziele des Projekts 3Ccar lassen sich in sechs Gruppen unterteilen:
- Wettbewerbsvorteile durch komplexere halbleiterbasierte Systeme
- Kostenreduktion von Automobilkomponenten
- Kontrolle der Komplexität durch Architekturen ermöglicht neue Untergliederung
- Reduktion der Wartungskosten von Fahrzeugen
- Mehr Elektrofahrzeuge auf die Straßen bringen, und dadurch Verbrennungsmotoren ersetzen
- Verbesserung der CO2-Bilanz für den Verkehr
Die Ostbayerische Technische Hochschule Amberg-Weiden (OTH-AW) wird zusammen mit den Projektpartnern einer Erweiterung der C2I (Car-to-Infrastructure) Kommunikation durch eine LTE-Verbindung speziell für Elektrofahrzeuge entwickeln. Das Netzwerk von Elektrofahrzeugen soll durch eine 4G-Verbindung mit hohen Datenraten erweitert werden und wird durch ein LTE-Modul, das mit dem Netzwerk verbunden ist, verwirklicht. Innerhalb des Projekts wird die LTE-Verbindung hinsichtlich der passenden Datenverbindung zur Fahrzeugumwelt evaluiert. Auf das Boardnetz des Elektrofahrzeugs wird über verschiedene Automotive Schnittstellen, wie Ethernet oder CAN zugegriffen, wobei die Architektur die verschiedenen Aspekte von Sicherheit hinsichtlich der Kommunikation von Elektrofahrzeug und Umwelt berücksichtigen muss.

ADACORSA soll die technischen Komponenten (Hardware, Software, Kompetenzen und Verfahren) liefern, die erforderlich sind, um halbautonome Drohnen außerhalb der Sichtweite (BVLOS) sowohl im unkontrollierten (Very Low Level) Luftraum als auch im kontrollierten Luftraum zu betreiben und dass unter einer bisher nicht dagewesenen Preispolitik. Dies soll die deutschen und europäischen Partner für die Anwendung mit teilautomatisierten bzw. voll-autonomen Drohnen im BVLOS Betrieb vorbereiten, um in Zukunft auch diesen Markt mit neuen Geschäftsmodellen gestalten zu können.
Die OTH-AW befasst sich mit der Kommunikation von Drohnen in Hinblick auf BVLOS Szenarien und im speziellen mit den beiden Aspekten Zuverlässigkeit (Reliability, Safety) und Sicherheit (Security). Als Beitrag zur zuverlässigen Kommunikation zwischen Drohne und Operator erforscht und entwickelt die OTH-AW Modelle zur Prädiktion der Mobilfunk-Verbindungsqualität. Auf Basis von realen luftgestützten Messungen sollen verschiedene Algorithmen, aus dem Bereich Machine Learning oder geo-basierte Verfahren, entwickelt und auf ihre Eignung für die Vorhersagemodelle bewertet werden. Die entwickelten Modelle werde dann zum einem vom niederländischen Projektpartner AnyWi herangezogen, um in einer multimodalen Kommunikationsarchitektur eine frühzeitige Auswahl der optimalen Mobilfunkverbindung (Provider) für das Versenden von Nachrichtenpaketen, auf Basis von QoS (Quality of Service) Vorhersagen, zu ermöglichen. Zum anderen untersucht die OTH-AW die Anwendung der Vorhersagemodelle zur Berechnung von QoS-optimierten Flugtrajektorien, um die Robustheit gegenüber möglicher Kommunikationsausfällen durch Zellwechsel oder Funklöcher zu erhöhen.
Der zweite Teilaspekt des Beitrags der OTH-AW zu ADACORSA zielt darauf ab, die Sicherheit von sogenannten „Flyling Ad-hoc Networks (FANETs)“, in denen (autonome) unbenannte Luftfahrzeuge kommunizieren, durch die Erforschung von Authentifizierungs- und Trust-Management-Systeme zu verbessern. Dazu wird die OTH-AW, unter Berücksichtigung von Erkenntnissen aus dem Automobilbereich und anderer mobiler „Ad-hoc“ Netzwerke, ein leistungsfähiges Trust-Management-System für FANETs entwickeln und demonstrieren. In enger Kooperation mit dem französischen Projektpartner CEA (Commissariat à l’énergie atomique et aux énergies) sollen so die vertrauensbasierten Sicherheitsaspekte der FANETs untersucht und Lösungsansätze entwickelt werden.
Aufbau von europäischen Systemen und Komponenten für ECS 2030 Fahrzeuge um die Produktion für den Massenmarkt zu unterstützen. Das alles basierend auf den Green Deal Prinzipien.
Ziele des Projektes AI4CSM
- Aufbau von europäischen Systemen und Komponenten für ECS 2030 Fahrzeuge um die Produktion für den Massenmarkt zu unterstützen. Das alles basierend auf den Green Deal Prinzipien.
- Entwicklung von Elektronischen Komponenten und Systemen für Connected and shared mobility using trustworthy AI.
- Eine Sektorübergreifende Mission welche sowohl den Automotiven, den Halbleiter Sektor und die Gesellschaft umfasst.
- Automatisierung, Elektrifikation, Standardisierung und Digitalisierung durch neue, KI-gesteuerte Fahrzeuge
| Projektpartner: | INFINEON TECHNOLOGIES AG (Federführung) + 36 weitere Projektpartner |
|---|---|
| Fördergeber: | EU und Bund |
| Laufzeit: | 01.07.2021 – 30.11.2024 |
Aufgrund des derzeitigen Rückstandes der europäischen Industrie im Vergleich zur anderen Teilen der Welt bei der Integration von künstlicher Intelligenz, legt AI4DI (ArtificialIntelligenceforDigitizingIndustry) den Fokus darauf, konkrete Anwendungsfälle von KI für die Digitalisierung im Industriebereich herauszuarbeiten und einzubringen. Ein Schwerpunkt liegt hierbei in dem Transfer von Machine Learning Ansätzen aus der Cloud, hin zum Anwendungsfeld (Edge), welche Herstellungsprozesse, Mobilität und Robotik beinhaltet.
In insgesamt sieben Zielen werden verschiedene Facetten der KI von den Partnern betrachtet. Hinrunter fallen u.a. die Bereiche verteilte künstliche Intelligenz, Mensch-Maschine Kollaboration und Komponenten für das Internet der Dinge. Diese Ziele werden dabei auf fünf Arbeitsbereiche abgebildet, darunter die Automobilbranche, die Halbleiterherstellung und das Transportwesen.
Als wichtiger Betrachtungspunkt für die Verwendung von KI untersucht die OTH-AW in Zusammenarbeit mit VTT, Linkker und Murata die Verwendung von KI im Bereich von Mobility as a Service.
Die Bevölkerung im ländlichen Raum ist für die Erfüllung von Grundbedürfnissen, wie Einkaufen, Arzt- und Schulbesuche etc. auf das eigene Fahrzeug angewiesen. Die Zielsetzung des Projektes ist es, ein zusätzliches Mobilitätsangebot auch für die zu schaffen, die nicht selber fahren können. Dazu sollen Techniken entwickelt werden, die einen kostengünstige autonomen Fahrbetrieb in ländlicher Umgebung ermöglichen. Welche Sensorik, welche Kontrolltechnik ist minimal erforderlich? Wie können in Serienfahrzeugen bereits jetzt verfügbare Sensoren (Abstands-Radar, Kameras für die Erkennung von Fahrspuren) genutzt werden? Wie können Straßen, Ampeln, Kreuzungen angepasst werden, um autonome Fahrzeuge mit kostengünstiger, einfacherer Technik die Orientierung zu erleichtern? Komplexe Szenarien und hohe Geschwindigkeiten sollen eher vermieden werden, um das Projektziel der Umsetzbarkeit mit überschaubaren Kosten nicht zu gefährden. Wichtigstes Projektergebnis wird ein fahrbereiter Demonstrator sein.
Hauptaufgabe der Ostbayerischen Technischen Hochschule Amberg-Weiden ist es, die Kommunikationsplattform gemäß den speziellen Anforderungen für autonomes Fahren im ländlichen Raum zu entwickeln, zu realisieren, Kommunikationseinheiten sowohl für die Integration in den automatisierten Bus als auch in intelligente Verkehrszeichen und Ampeln zu integrieren, das gesamte V2X-Kommunikationssystem in Betrieb zu nehmen und im Probebetrieb zu evaluieren. Hierzu werden u.a. relevante Verkehrssituationen und Anforderungen an die Infrastruktur gemeinsam mit den Partnern erarbeitet und eine Probekreuzung sowie eine Probehaltestelle eingerichtet.
| Projektpartner: | AVL Software & Functions GmbH |
|---|---|
| Fördergeber: | Freistaat Bayern |
| Laufzeit: | 01.08.2020 – 31.10.2023 |
Das Forschungsprojekt AUTOSAFE (Fakultät für Elektrotechnik, Medien und Informatik) wurde im September 2005 vom Bundesministerium für Bildung und Forschung (BMBF) gestartet. Die Projektdauer war bis März 2009. Übergeordnetes Ziel dieser Initiative war die Erforschung eines modularen Systems für die integrale Sicherheit im Straßenverkehr.
AUTOSAFE wurde bearbeitet von Siemens VDO Automotive, Porsche Engineering Group, Infineon Technologies sowie von Siemens Restraint Systems. Der Fachbereich Elektro- und Informationstechnik der Hochschule Amberg-Weiden unterstützte vor allem die Software-Entwicklung des Projekts in denBereichen AutoSAR, Bildverarbeitung, Pre-Crash und Wireless-Connections.

Das ECSEL JU Projekt AutoDrive beschäftigt sich mit der angewandten Forschung an der Verbesserung elektrischer Komponenten, Systeme und Architekturen im Umfeld des automonen Fahrens im Bereich der Fehlererkennung, Fehlersicherheit und Fehlerbeseitigung. Ziel ist die Mobilität durch die Ergebnisse sicherer, preisgünstiger und benutzerfreundlich zu gestalten.
In insgesamt zehn Wertschöpfungsketten wird das Forschungsziel bearbeitet mit Fokus das autonome Fahren (SC1) und hochautomatisierte Fahren (SC2). Die restlichen Ketten betrachten hierbei Teildisziplinen, u.a. Fahrzeug-Kommunikation, Umfeldmodellen und Predictive Maintenance.
Die OTH-AW übernimmt Aufgaben aus verschiedenen Wertschöpfungsketten, darunter in Highlyautomateddriving (SAE Level 4) und Safe, secure and lowlatencycommunication.
Der Schwerpunkt der Arbeit in SC2 liegt hierbei bei dem Bus Demonstrator, welcher in Zusammen-arbeit mit spanischen Institut Technalia entwickelt wird. Ziel ist es hochautomatisiert auf einer ausgewählten Teststrecke in Malaga, Spanien, zu fahren.
Die OTH-AW wird hierbei eine Hardware-Plattform bereitstellen, welche dem Bus Umfeld-informationen über die gegebene Infrastruktur, u.a. Ampelzustände, zurückgibt
Ganzheitliches Energie Management für Elektrofahrzeuge der dritten und vierten Generation
eDAS steht für efficiency powered by smart Design meaningful Architecture connected Systems.
Im Rahmen einer Kooperation mit den Projekten "iCompose" und "Incobat" soll im Projekt "eDAS" eine technische Lösung zur Reichweitensteigerung und zuverlässigen Restreichweitenvorhersage von Elektrofahrzeugen der dritten und vierten Generation erforscht werden. Das Projekt "eDAS" läuft seit 01.10.2013 und wird 36 Monate andauern. Es wurde von einem Konsortium aus 15 europäischen Partnern aus Forschung und Industrie bei der Europäischen Union beantragt und genehmigt.
Der Hauptfokus des Projekts liegt in der Vernetzung und intelligenten Nutzung der verschiedenen Energiequellen in einem Elektrofahrzeug. Die einzelnen Partner liefern Hard- und Softwarekomponenten, die zusammen die Reichweite eines zukünftigen Elektrofahrzeugs steigern und die Qualität der Reichweitenvorhersage erhöhen sollen. Bei der Entwicklung der nötigen Schnittstellen wird mit den Projekten "iCompose" und "Incobat" kooperiert um eine gemeinsame Hard- und Softwareplattform nutzen zu können, und so den Folgeaufwand für eine Systemintegration zu reduzieren.
Der Aufgabenbereich der OTH Amberg-Weiden liegt in der Entwicklung von Software-Modulen, die auf dem zentralen Steuergerät des Fahrzeugs eingesetzt werden. Im Mittelpunkt steht dabei die Entwicklung eines Energy Resource Schedulers (ERS), der einen Softwarelayer des Energy Management Systems (EMS) bildet. Zusammen mit der zu entwickelnden Hardware, sowie den Applikationsschichten der Controller Software, soll ein System zur intelligenten, routen- und nutzungsabhängigen Energieverwaltung im Fahrzeug aufgebaut werden.
Die Projektverantwortung an der OTH Amberg-Weiden liegt bei Prof. Dr. Höß. Die Bearbeitung wird von Frau Lepke und Herrn Waigel übernommen.

Das Projekt wurde mit einem Konsortium aus rund 30 europäischen Partnern im Juli 2010 bei ENIAC beantragt. Das Projekt wurde im Frühjahr 2011 bewilligt und läuft seit 1.7.2011. Es zielt auf die Entwicklung eines vollständig elektrischen Antriebs für den Einsatz im Automobil.
Die besonderen Herausforderungen des Projekts stellen der Entwicklung neuartiger energieeffizienter Komponenten und die Steuerung deren Zusammenspiels zur Gewährleistung hoher Sicherheitsstandards dar. Künftige E-Fahrzeuge müssen auch bei Auftreten einiger Fehler funktionsfähig bleiben und wenigstens ein sicheres Verlassen der Verkehrszone erlauben. Der Schwerpunkt der Forschungsarbeiten verschiebt sich von der Einzelkomponentenebene hin zur Gesamtintegration der Teilsysteme zu einem ausfallsicheren, zuverlässigen und hoch effizienten Antriebssystem.
Die Aufgaben der OTH Amberg-Weiden bestehen hier in der Software-Entwicklung für ein Automotive-Steuergerät von Infineon mit Fokus auf Signalgewinnung und Aufbereitung von Sensoren im Rotor einer völlig neuen Elektro-maschine, der geschickten Verwendung von Redundanzen und der Integration von Partner-Software-Modulen auf dieser Plattform gemeinsam mit den jeweiligen Partnern. Das Projekt wird schwerpunktmäßig von Fr. Lepke bearbeitet und von Prof. Höß betreut.

Die Fakultät für Elektrotechnik, Medien und Informatik widmet sich der angewandten Forschung im Bereich Fahrerassistenzsysteme im Forschungsprojekt HAVEit (Highly Automated Vehicles for Intelligent Transport) des 7th Framework Programme der EU FP7. 18 namhafte Firmen und Forschungseinrichtungen richten in HAVEit sieben Versuchträger ein (4 PKW, 3 LKW). Das Projekt gliedert sich in die zwei Bereiche „Highly automated driving“ und „Savety architecture applications“.
Die Hauptaufgabe der Fakultät EMI besteht dabei in der Entwicklung und Implementierung von Algorithmen für ein Netzwerk aus Radarsensoren zur Überwachung des Seiten- und rückwärtigen Fahrzeugbereichs im Subprojekt „Automated Roadwork Assistance“. Ziel dieser Anwendung ist es den Fahrer in Stress-Situtationen hochautomatisiert zu unterstützten, insbesondere während der Durchfahrt von Baustellen auf Autobahnen. Spezielle Herrausforderungen dabei sind z.B. enge Fahrspuren, nicht eindeutige Fahrbahnmarkierungen, wechselnde Geschwindigkeitsbegrenzungen oder andere dicht nebenherfahrende Fahrzeuge.
Email: automotive @oth-aw.de
@oth-aw.de

Durch KI-ASIC soll die neuromorphe Elektronik aus der akademischen Grundlagenforschung in die automobile Anwendung überführt werden und Lösungen für die zentralen Herausforderungen des autonomen Fahrens bieten. Das Vorhaben leistet damit einen wichtigen Beitrag zur Erhöhung der Innovationsstärke der deutschen Automobilindustrie und des Standortes Deutschland.
Ziele des Projekts KI-ASIC:
- Verwendung neuromorpher Prozessorarchitekturen für die Radarverarbeitung unter Verwendung von Deep Neural Networks (DNN) und Spiking Neural Networks (SNN)
- Akquisition, Aufbereitung und Evaluation von Radar-Signalen als Datenbasis für die Entwicklung von KI gestützten neuromorphen Prozessorarchitekturen
- Senkung der Energiebilanz für Radarsensor
- Erstanwendung der neuromorpher Prozessoren (SpiNNaker 2) für produktiven Automobilbereich
- Wissensgewinn im Bereich der Kodierung und Anwendung von SNN

Das Forschungsprojekt Ko-HAF (Akronym für: Kooperatives hochautomatisiertes Fahren) der Ostbayerischen Technischen Hochschule Amberg-Weiden (OTH-AW) zielt auf die nächsten Schritte in Richtung hochautomatisiertes Fahren bei höheren Geschwindigkeiten ab. Das Hauptziel ist, die Detektionsreichweite eines Fahrzeugs zu erhöhen. Dabei werden Sensordaten vieler automatisierter Fahrzeuge mittels eines Sicherheitsservers fusioniert und aggregiert. Hierfür ist es notwendig, eine Kommunikation über das Mobilfunknetz aufzubauen.
Um eine zuverlässige Datenübertragung zu garantieren, ist es wichtig, die Kommunikation stetig zu kontrollieren. Hierfür muss einepassende Software entwickelt werden. Diese Arbeit präsentiert verschiedene Ansätze, um ein Netzwerk passiv zu überwachen. Zu Beginn werden verschiedene Algorithmen vorgestellt, um Qualitätsparameter wie Umlaufzeit und Durchsatz einer Verbindung zu bestimmen. Danach wird aufgezeigt, wie verschiedene mobilfunkbezogene Daten erfasst werden können. Zum Ende zeigt die Arbeit verschiedene Anwendungsfälle, um mittels dieser Daten das automatisierte Fahren signifikant zu verbessern.
{kind=link}
Urbaner Raum: Benutzergerechte Assistenzsysteme und Netzmanagement
Durch den ständigen Zuwachs an Fahrzeugen weltweit nimmt die Verkehrsdichte auf Straßen und Autobahnen ständig zu. Wurden im Jahr 1998 weltweit ca. 38 Mio. Personenkraftwagen hergestellt, hat sich die Zahl 2014 auf fast 68 Mio. annähernd verdoppelt. Damit verbunden sind steigende Anforderungen, die an das Konzentrations- und Reaktionsvermögen der Verkehrsteilnehmer gestellt werden. Viele Fahrzeugführer sind durch die große Informationsflut oft abgelenkt oder überfordert. [Wai15]
Um den heutigen Herausforderungen im dichter gewordenen Verkehr gerecht zu werden, statten Fahrzeughersteller immer mehr Fahrzeuge serienmäßig mit Fahrerassistenz- und Sicherheitssystemen aus. Diese Systeme sollen den Fahrer entlasten und dafür Sorge tragen, dass sich der Fahrzeugführer auf seine wesentlichen Aufgaben konzen- trieren kann. Trotz der steigenden Anzahl von Unfällen ist aufgrund des höheren Sicherheitsniveaus der Fahrzeuge ein klarer Trend zu immer weniger Verkehrstoten feststellbar. [Wai15]
Besonders im urbanen Raum finden sich viele Herausforderungen, da in diesem Bereich eine hohe Verkehrsdichte auf ein begrenztes Platzangebot in der Verkehrsfläche trifft. Im Forschungsprojekt Urbaner Raum: Benutzergerechte Assistenzsysteme und Netzmanagement (UR:BAN) werden neue Lösungen für diesen Verkehrsraum erforscht. [Wai15]
Die OTH Amberg-Weiden arbeitet in diesem Projekt neben 30 Partnern aus Industrie und Forschung als Unterauftragnehmer für die Continental Teves AG & Co. oHG an Radarsensorik die für den Einsatz in urbanen Einsatzszenarien modifiziert wurde. Das Team des Projektbüros Automotive Engineering um Prof. Dr. Alfred Höß arbeitet an der Charakterisierung der neuen Sensoren und beschäftigt sich im Auftrag der Continental Teves AG & Co. oHG in der Hauptsache mit der Auswertung vermessener Engstellen und Parkszenarien. Dafür wurden im Rahmen des Projektes eigene Messeinrichtungen entwickelt und Auswertungsalgorithmen programmiert. Der Forschungsauftrag der OTH Amberg-Weiden im Projekt UR:BAN endet mit dem Kalenderjahr 2015.
Quelle:
[Wai15] A. Waigel, Analyse und Evaluierung eines W-Band Radarsensors in Nahbereichsanwendungen für das urbane Umfeld, Masterarbeit, Ostbayerische Technische Hochschule Amberg-Weiden, Amberg, Juni 2015

Dynamisch geformte zuverlässige Mobilkommunikation für das automatisierte Fahren
Fahrzeuge mit der Automatisierungsstufen 3-5 und einer fehlertoleranten Rundumwahrnehmung, Messung und Prädiktion der Qualität des Mobilfunks während der Autofahrt, Bewertung von mobilen Datenverbindungen.
Bei höheren Automatisierungsgraden (Level 4 und insbesondere Level 5) steht der Fahrer nicht als Rückfalloption zur Verfügung, so dass die Automatisierung in der Lage sein muss, sicherheitsrelevante Situationen selbständig bewältigen zu können. Bei diesen Automatisierungsstufen ist Fehlertoleranz entscheidend, und zwar entlang der gesamten Automatisierungskette, angefangen vom Sensieren über das Planen bis hin zur Ausführung. Genau hier setzt PRYSTINE an: PRYSTINE verfolgt das Ziel, für die Automatisierungsstufen 3-5 eine fehlertolerante Rundumwahrnehmung zu realisieren (engl. Fail-operational Urban Surround perceptION, FUSION), welche auf robuster Radar und Lidar Sensorfusion basiert. Die im Projekt zu entwickelnden Kontrollfunktionen sollen sicheres automatisiertes Fahren in urbaner Umgebung sowie auf Landstraßen ermöglichen.
Ziele von Prystine:
- Fahrzeuge mit der Automatisierungsstufen 3-5 und einer fehlertolerante Rundumwahrnehmung für urbanes, wie auch ländliches Umfeld.
- Messung und Prädiktion der Qualität des Mobilfunks während der Autofahrt.
- Bewertung von mobilen Datenverbindungen.
- Verringerung der Laufzeit von Mobilfunk basierter Kommunikation für das automatisierte Fahren im ländlichen Umfeld.
- Robuste C-V2X Kommunikation für sicheres automatisiertes Fahren.
Das Teilprojekt der OTH Amberg-Weiden setzt sich zum Ziel, abhängig von der Qualität der Mobilfunkverbindung die höchstmögliche Übertragungsgeschwindigkeit bei höchster Zuverlässigkeit und Sicherheit der Mobilfunkverbindung zwischen Backend und Fahrzeug zu gewährleisten.
Durch das breitgefächerte Spektrum von Forschungsthemen bietet das Team Automotive auch Master- und Bachelorarbeiten in Bereich Automotive-Hochautonomes Fahren, Sensordatenverarbeitung, KI-Algorithmen und Softwareentwicklung an.