
Forschungsfeld Leichtbaurobotik
Einführung
Leichtbauroboter zeichnen sich, im Gegensatz zu Industrierobotern, durch geringe Investitionskosten und ein geringes Eigengewicht aber auch eine geringe Traglast und einen kleinen Arbeitsraum aus. Ihr größter Vorteil ist die leichte Programmierbarkeit. Studenten, die noch nie vorher einen Roboter programmiert haben, können innerhalb von Stunden den Roboter programmieren und bedienen.
Leichtbauroboter werden auch als kollaborierende Roboter oder Cobots bezeichnet. Ursprünglich wurden sie für die Zusammenarbeit mit Menschen entwickelt. Dazu sind sie mit integrierter Sicherheitstechnik, wie Kraft-/Momentensensoren, ausgestattet. Ein trennender Schutzzaun ist dadurch nicht mehr erforderlich. Allerdings können die Leichtbauroboter, bei der Zusammenarbeit mit Menschen, nur mit reduzierter Geschwindigkeit betrieben werden. Dies soll das Verletzungsrisiko bei Kollisionen weiter vermindern.
Der Grundgedanke, die intellektuellen und sensorischen Fähigkeiten des Menschen mit der Präzision, Kraft und Zuverlässigkeit eines Roboters im selben Arbeitsraum zu kombinieren, ist vielversprechend. Leider erschweren die rechtlichen Rahmenbedingungen heute vielfach den industriellen Einsatz der Mensch-Roboter-Kollaboration (MRK). Selbstverständlich muss auf die Arbeitssicherheit großer Wert gelegt werden, um Verletzungen der Mitarbeiter zu vermeiden. Man kann aber alles übertreiben. Die momentanen normativen Anforderungen sind so hoch angesetzt, dass die Integration einer MRK-Roboterzelle nur mit extrem hohem Aufwand umgesetzt werden kann. Die Überregulierung erschwert die Einführung dieser innovativen Technologie in Europa und schadet der Wettbewerbsfähigkeit.
Leichtbauroboter werden aber nicht nur für die Mensch-Roboter-Kollaboration eingesetzt. Sie können selbstverständlich auch klassisch innerhalb von trennenden Schutzeinrichtungen eingesetzt werden. Die Verfahrgeschwindigkeit kann dann erhöht werden, was die Produktivität (Taktzeit) deutlich verbessert. Der große Vorteil gegenüber klassischen Industrierobotern ist die einfache Programmierbarkeit. Leichtbauroboter können von Facharbeitern und Werkern, ohne spezielle Robotik-Ausbildung, programmiert werden. Dies kommt dem Trend zu höherer Variantenvielfalt bei kleineren Losgrößen entgegen. Die dazu erforderliche Steigerung der Flexibilität kann durch eine bedarfsgesteuerte Anpassung der Roboterprogramme durch das Bedienpersonal vor Ort erreicht werden. Statt komplexer und teurer Montageanlagen geht der Trend hin zu sog. Roboterfarmen. Darunter versteht man die flexible Zusammenstellung von spezialisierten Roboterzellen zu einem adaptierbaren Produktionssystem.
Ein weiterer Aspekt ist der zunehmende Mangel an Fachkräften durch den demografischen Wandel. Wenn keine geeigneten Mitarbeiter gefunden werden können, können deren Aufgaben von Leichtbaurobotern übernommen werden. Anwendungsgebiete sind z.B. die Maschinenbeschickung, Montageprozesse, Bearbeitungsprozesse oder Logistikanwendungen. Durch ihr geringes Eigengewicht können Leichtbauroboter auf mobilen Plattformen montiert werden und damit ortsflexibel eingesetzt werden.
In dem Forschungsfeld Leichtbaurobotik beschäftigen wir uns, aus den oben genannten Gründen, (noch) nicht mit der Mensch-Roboter-Kollaboration. Wir konzentrieren uns auf den Einsatz von Leichtbaurobotern hinter trennenden Schutzeinrichtungen. Im Fokus steht die Erhöhung der Flexibilität der Roboteranwendung durch Sensoreinsatz und die Effizienzsteigerung durch Offline-Programmierung.
Die Forschungsschwerpunkte liegen auf den Gebieten:
- Einsatz der 2D-Bildverarbeitung in Robotikanwendungen
- Qualifizierung der 3D-Bildverarbeitung für Robotikanwendungen
- Einsatz der Kraft-/Momentenregelung für kraftbasierte Applikationen
- Erstellung komplexer Roboterprogramme mit Offline-Programmierung
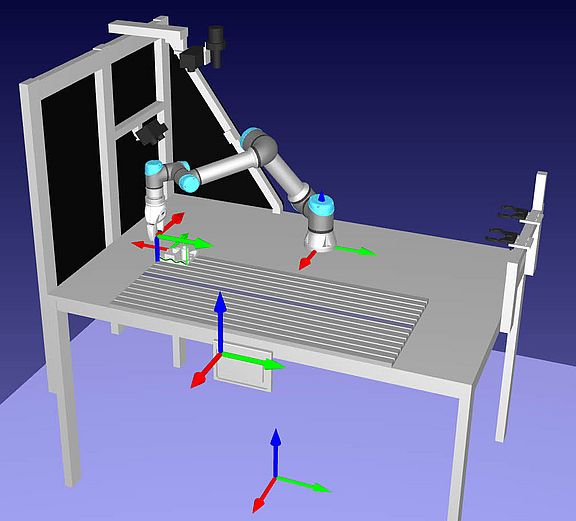
Erprobt werden die entwickelten Methoden in einer stationären Roboterzelle (Abbildung 1, links) und einer mobilen Plattform (Abbildung 1, rechts).
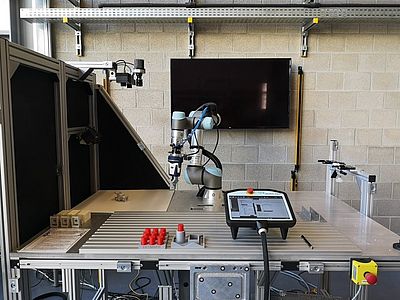
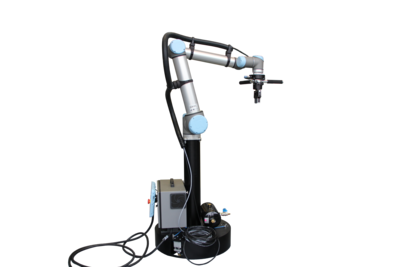
Abbildung 1: Forschungszelle zur Leichtbaurobotik und mobile Leichtbauroboterplattform
2D-Bildverarbeitung für Robotikanwendungen
2D-Bildverarbeitungssysteme ergänzen den Roboter um einen Sehsinn. Die 2D-Bildverarbeitung ist in der Robotik schon lange im Einsatz. Im Gegensatz zu den teurern PC-basierten Bildverarbeitungssystemen werden heute vor allem Smart-Kamerasysteme eingesetzt. Dabei befindet sich die Optik und die Auswerteelektronik in einem kleinen, kompakten Gehäuse. Diese Kamerasysteme können direkt an dem Roboterarm appliziert werden. Die Integration in die Robotersoftware erfolgt durch mitgelieferte Plugins. Die Inbetriebnahme und Bedienung der Kameras ist damit sehr einfach umsetzbar. Wir verwenden im Labor für Automatisierungstechnik und Robotik das Smart-Kamerasystem Visor Robotic der Firma sensopart. Dieses Kamerasystem wird auch von der Software ArtiMinds (siehe unten) unterstützt. Damit wird eine einfache Programmierung einer kamerabasierten Roboterapplikation ermöglicht.
Die Haupteinsatzgebiete eines 2D-Kamerasystems in der Robotik liegen im Aufnehmen und Ablegen von Werkstücken, die sich u.U. auf einem bewegten Förderer befinden.
3D-Bildverarbeitung für Robotikanwendungen
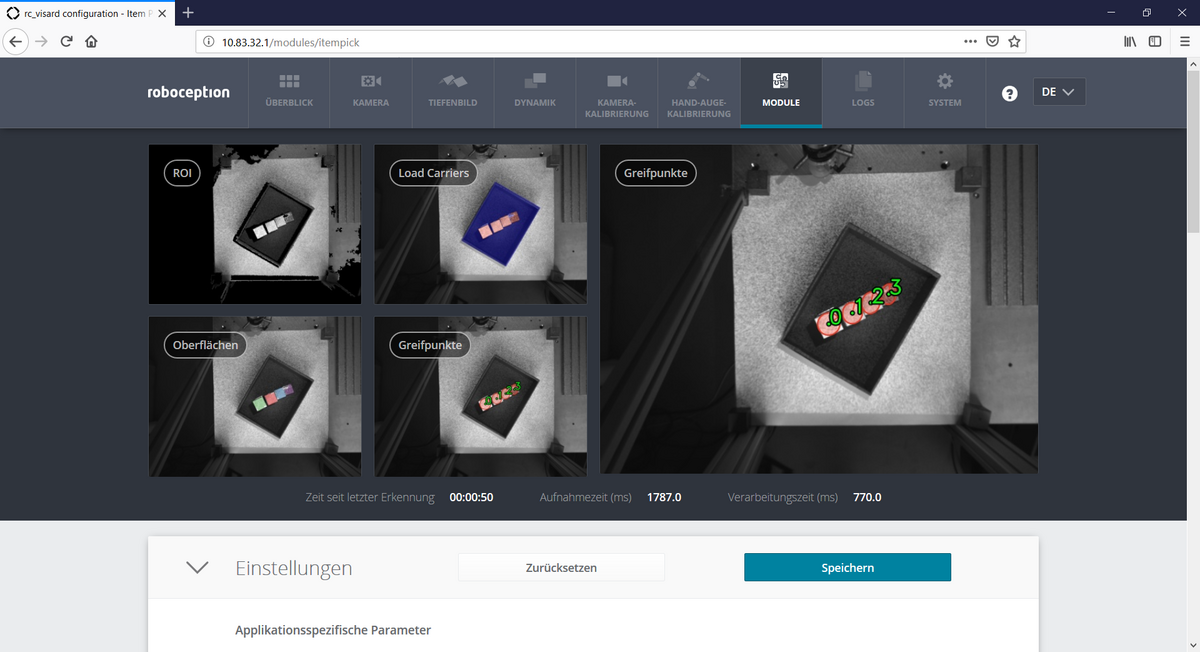
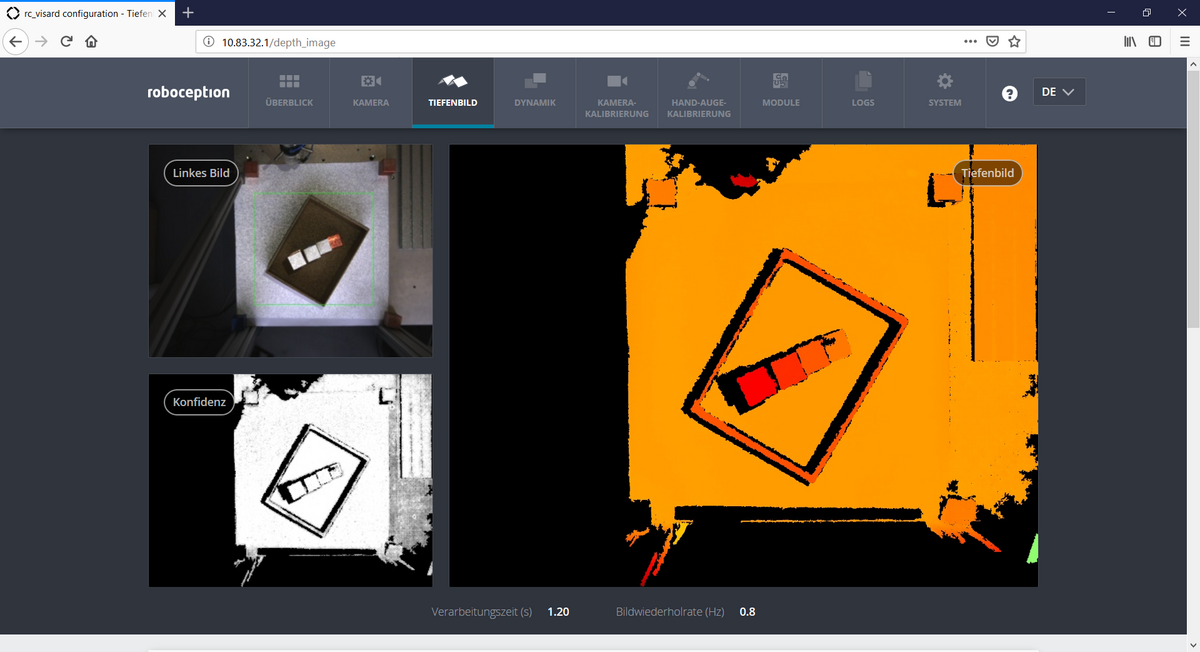
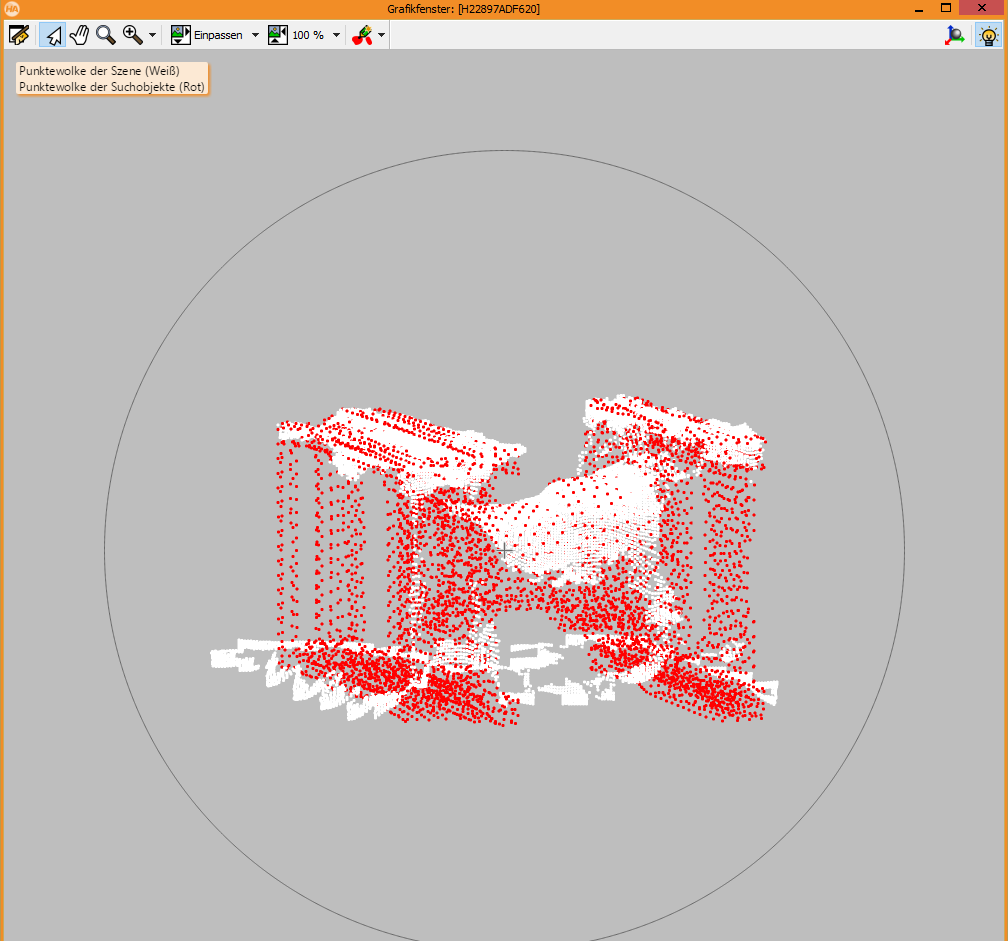
Die 3D-Bildverarbeitung gewinnt in der Robotik zunehmend an Bedeutung. Im Gegensatz zur 2D-Bildverarbeitung können auch Objekte lokalisiert werden, die sich nicht auf einer definierten Ebene befinden. Dies können z.B. Objekte sein, die sich in Regalfächern befinden oder gestapelt sind. Ein bedeutendes Anwendungsgebiet ist das sog. Bin Picking. Dieses bezeichnet man auch als "Griff in die Kiste". Kleine Objekte, meist aus Kunststoff, werden als Schüttgut in einer Kiste bereitgestellt. Der Roboter muss aus dem ungeordneten Haufen einzelne Objekte entnehmen können. Dies ist nur mit zusätzlichen Tiefeninformationen möglich. Im Labor für Automatisierungstechnik und Robotik setzen wir dazu zwei 3D-Sensoren der Firma roboception ein. Als Softwareplattform verwenden wir die leistungsfähige Bildverarbeitungssoftware Halcon der Firma MVTec.
Das dreidimensionale Sehen funktioniert bei Stereo-Kamerasystemen ähnlich wie beim Menschen. Die zwei Linsen (zu vergleichen mit beiden Augen) betrachten das gleiche Objekt aus zwei minimal verschiedenen Blickwinkeln. Somit taucht ein bestimmter Punkt auf den beiden Kamerabildern an verschobedie Ausdehnen Stellen auf. Diese Verschiebung nennt sich Disparität. Mittels Triangulation können daraus Absatndsinformationen des Objekts berechnet werden. Das Stereokamerasystem RC_visard von roboception liefert derartige Bilddaten der beiden Kamerasensoren und zusätzlich ein kalibriertes Tiefenbild. Außerdem wird es zur Hand-Auge-Kalibrierung des Roboters verwendet. Die Bilddaten werden in Halcon verarbeitet. Halcon führt dann ein Matching der CAD-Daten des zu greifenden Werkstücks mit der Punktwolke durch. Als Ergebnis erhält man die Greifposition des Werkstücks in Roboterkoordinaten.

Kraftbasierte Robotikanwendungen
Neben den Bildverarbeitungssystemen für die Robotik, stellen Kraft-/Momentensensoren die zweite wichtige Gruppe von Robotiksensoren dar. Kraft-/Momentensensoren erweitern den Roboter um einen Tastsinn. Damit können kraftgeregelte Füge- oder Bearbeitungsapplikationen umgesetzt werden. Typische Anwendungsgebiete sind die Montage und Bearbeitungstechnologien, wie Entgraten oder Polieren. Zur Vermeidung von Verklemmungen bzw. zur Einhaltung applikationsspezifischer Kraftwerte ist ein Kraft-/Momentensensor unbedingt erforderlich. Leider ist die Programmierung von Kraftregelkreisen eine anspruchsvolle Aufgabe. Deshalb setzen wir das Produkt ArtiMinds der gleichnamigen Firma für kraftgeregelte Anwendungen ein. ArtiMinds stellt vorprogrammierte Templates für eine Vielzahl von Anwendungsfällen bereit. Mit der Template-Bibliothek kann ein Roboterprogramm für komplexe kraftgeregelte Anwendungen intuitiv erstellt werden. Das spart viel Zeit und Kosten. Vor allem für die Ausbildung von Studierenden ohne Vorkenntnisse ist dies sehr vorteilhaft.
Roboter-Offline-Programmierung
Leichtbauroboter zeichnen sich durch Ihre leichte Programmierbarkeit aus. Wozu dann noch eine Offline-Programmierung verwenden?
Einfache Handhabungsaufgaben können mit einem Leichtbauroboter durch "Vormachen" leicht und schnell programmiert werden. Soll der Roboter allerdings energieoptimal und mechanikschonend komplexe Bewegungssequenzen oder Konturen abfahren, so ist eine Teach-In-Programmierung meist zu zeitaufwändig und zu ungenau. Hier setzen Offline-Programmiersysteme an, die komplexe Bewegungsbahnen, auf Basis eines CAD-Modells des Werkstücks, optimal berechnen können. Potentielle Anwendungen sind hierbei Entgaten, Schleifen, Polieren, Dichtmittel-/Klebstoffauftrag, Schweißapplikationen bis hin zu roboterbasierten CNC-Anwendungen oder der roboterbasierte 3D-Druck.
Wir setzen in Forschung und Lehre das Offline-Programmiertool RoboDK ein. Im Gegensatz zu Offline-Programmiertools der Roboterhersteller können mit RoboDK nahezu alle Roboterfabrikate simuliert werden. RoboDK ist intuitiv zu bedienen und überzeugt mit einem beispiellosen Funktionsumfang. Es handelt sich um ein offenes Programmiersystem, d.h. es besteht die Möglichkeit eigene Funktionalitäten in Form von Python-Code zu integrieren. Es existieren Plugins für weit verbreitete CAD-Systeme. Damit können direkt aus dem CAD-System heraus konturabhängige Roboterprogramme schnell erstellt werden. Mit RoboDK kann der Roboter als 6-Achs-Fräsmaschine oder als 3D-Drucker verwendet werden. Die offline-generierten Programme können direkt auf die reale Robotersteuerung übertragen und von RoboDK aus ausgeführt werden.
Voraussetzung für die Offline-Programmierung ist allerdings die Verwendung eines exakten Robotermodells in der Simulationssoftware. Weicht das kinematische Robotermodell in der Simulation von der realen Roboterkinematik ab, so müssen die offline-erstellten Programme mühsam nachgeteacht werden. RoboDK ist das einzige auf dem Markt verfügbare Offline-Programmiersystem, das eine Roboterkalibrierung ermöglicht. Hierzu wird ein zusätzliches Messsystem benötigt, wie, z.B. Laser Tracker oder optische Koordinatenmeßgeräte.

Wir verfügen im Labor für Automatisierungstechnik und Robotik über das hochgenaue Stereokamerasystem C-Track der Firma creaform. Dieses ist fast so genau (20um), wie Laser Tracker, aber deutlich preisgünstiger. Mit dem C-Track und RoboDK ist es möglich die kinematischen Parameter des Roboters durch einen Kalibriervorgang zu bestimmen. Außerdem kann der TCP exakt vermessen werden. Der Messvorgang wird von RoboDK, über entsprechende Oberflächen, gesteuert. Am Ende kann ein Kalibrierprotokoll erstellt und ein ISO9283-Genauigkeitstest durchgeführt werden. Mit der Kalibrierung konnte die Positioniergenauigkeit der Offline-Programme um den Faktor 5 verbessert werden!